最後更新時間:2016年3月16日
第一單元:機器人學簡介(林顯易老師)

正向運動學,就是用關節角度來定位置,通常比較簡單,逆向運動學,則是用機器人的位置來回推角度,常常一個位置有許多關節角度的擺法,所以比較複雜。
雅可比矩陣(Jacobian)可以解決逆向運動學的速度問題。
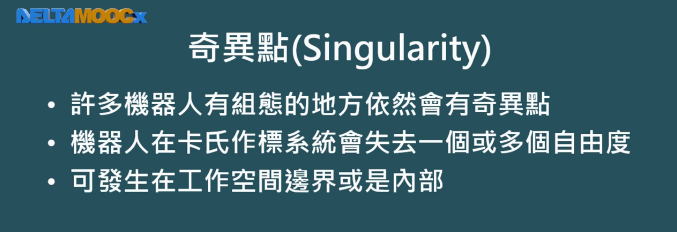
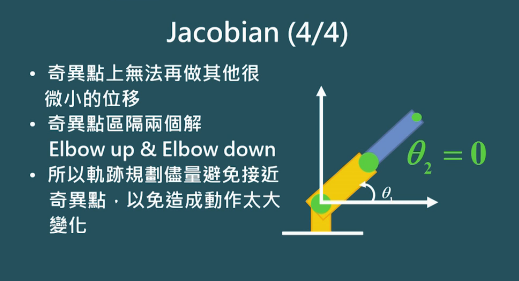
奇異點出現在關節伸直的情形,在設計上要儘量避免。
第二單元、第三單元剛體運動與齊次轉換(蕭俊祥老師)

例如:齊次轉換矩陣 讀作「H-1-0」,它的意思就是說,把O1座標上的向量P1,轉變成O0座標上的向量P0。
讀作「H-1-0」,它的意思就是說,把O1座標上的向量P1,轉變成O0座標上的向量P0。
讀作「H-1-0」,它的意思就是說,把O1座標上的向量P1,轉變成O0座標上的向量P0。
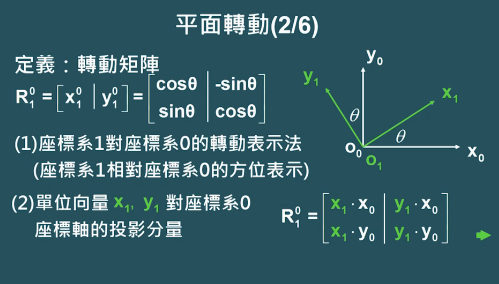
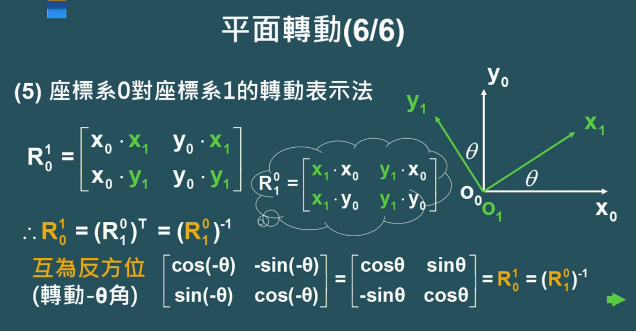
轉動的座標向量,可以正弦、餘弦的矩陣表示。
所以轉動矩陣寫法如下:
相關連結
我試著把每一次的內容筆記PO在這個部落格,大家要看最新的筆記可以連結到這裡,如果要上DeltaMoocX的機器人學,可以到這裡報名喔!
沒有留言:
張貼留言